Objetivos
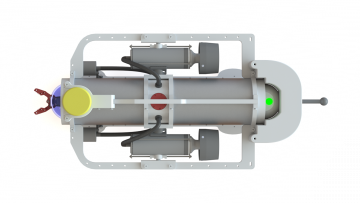
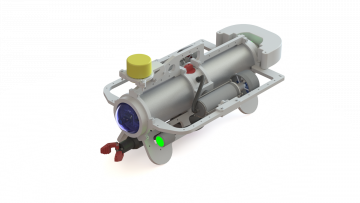
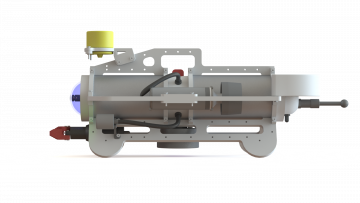
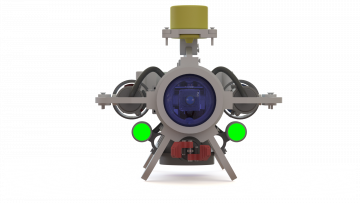
- Diseño y manufacturación del prototipo de robot submarino híbrido Owl, capaz de operar en modo manual ROV (Remotely Operated Vehicle) y modo autónomo AUV (Autonomous Underwater Vehicle).
- Diseño y programación del sistema de control, para el modo AUV basado en lógica difusa y con capacidad de navegación de tres horas.
- Integración de sistemas de posicionamientos dinámico basado en hidroacústica.
Funcionamiento
El aparato ofrece diversas funcionalidades y características dependiendo del modo de operación:
En modo AUV, cuenta con una autonomía de tres horas, diseñado exclusivamente para la navegación en piscinas de investigación y desarrollo submarino. Incorpora sensores de obstáculos ópticos que permiten un desplazamiento aleatorio en el espacio posible. Además, dispone de puertos para la integración de sistemas de posicionamiento dinámico basado en hidroacústica, lo que facilita las pruebas en aguas turbias.
Por otro lado, en modo ROV, puede ser controlado desde una consola a distancias de hasta 30 metros. Además de esto,posee capacidad de carga para manipular, examinar o extraer objetos en la superficie. Su fuente de alimentación es híbrida, lo que significa que puede funcionar tanto con batería como conectado a una fuente de alimentación eléctrica alterna.






Ventajas del robot submarino híbrido
- Autonomía extendida en modo AUV: Funciona durante tres horas en modo AUV, ideal para misiones submarinas prolongadas.
- Diseño especializado para navegación submarina: Diseñado exclusivamente para entornos acuáticos, garantizando un desplazamiento eficiente y seguro.
- Sensores de obstáculos ópticos: Facilitan la navegación precisa en espacios submarinos, evitando colisiones.
- Flexibilidad en aguas turbias: Puertos disponibles para sistemas de posicionamiento en aguas turbias basados en hidroacústica.
- Control remoto efectivo en modo ROV: Controlable desde una consola hasta 30 metros de distancia, con capacidad de carga para manipular objetos.
- Fuente de alimentación híbrida: Puede funcionar con batería o conectado a una fuente de alimentación eléctrica alterna.
En resumen, este dispositivo submarino destaca por su autonomía, precisión de navegación, capacidad de carga y versatilidad de alimentación, lo que lo convierte en una herramienta eficaz para exploración y operaciones submarinas.
Visite nuestro sitio para más información sobre este y otros proyectos nuestros.